| Proiectum |
Unitas |
Model |
| CMM2-20 |
CMM2-25 |
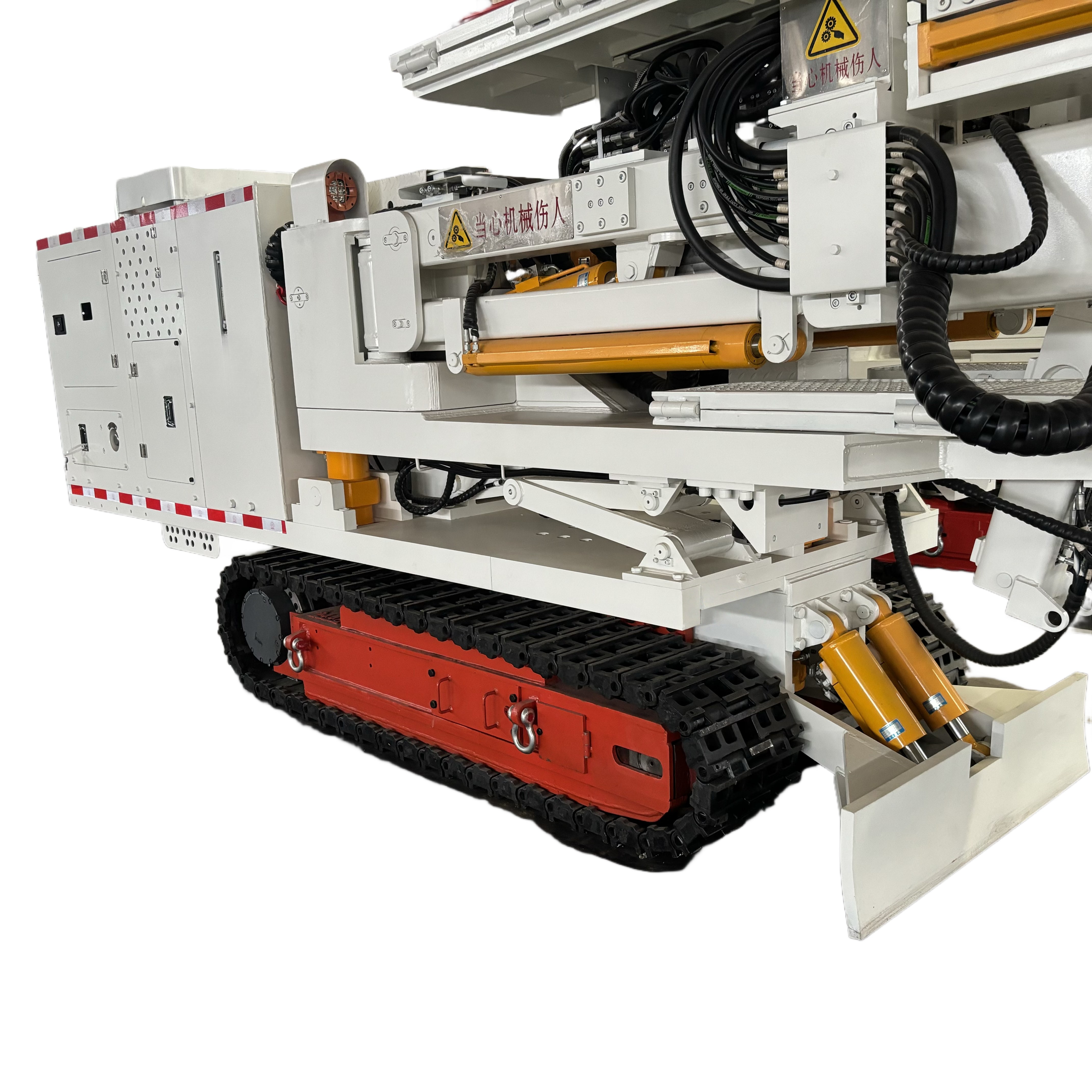
| Machina tota |
Numerus bracchiorum foratorium |
/ |
2 |
| Adaptare ad sectionem transversam viarum |
m² |
20 |
25 |
| Campus laborans (latitudo × altitudo) |
mm |
5000×4000 |
5500×4700 |
| Status laboris stabilizat latitudinem operativam vehiculi |
mm |
1200 |
1300 |
| Dimensiones externae status operandi (longitudo × latitudo × altitudo) |
mm |
4510×1200×1800 |
6150×1300×2400 |
| Diametros foraminis |
mm |
27~45 |
| Perforatio profunditas |
m |
0~10 |
0~18 |
| Adapta ad ferramentum perforandum |
mm |
B19/B22 |
| Potentia |
kw |
45 |
55 |
| Pondus machinae |
kG |
17500 |
18000 |
| Mechanisma rotatorium |
Rated torque |
Nm |
245 |
| Velocitas rotationis nominalis |
r/min |
550 |
| Impulsor |
Progredere eundem diem |
mm |
1650 |
| Vis propellens |
kN |
25 |
| Brachium foratorium |
Longitudo extensionis brachii foratorii |
mm |
500 |
600 |
| Angulus Inclinationis impellentis |
(°) |
0~60 |
0~90 |
| Angulus Oscillationis impellentis |
(°) |
0~45 |
0~30 |
| Eleva altitudinem corporis brachii horizontaliter |
mm |
2300 |
2500 |
| Mechanismus ambulandi |
Maxime walking celeritas |
m/min |
25 |
12 |
| Potentia scandendi |
(°) |
-20~+20 |
|
|
|
|
|
 ×
×